
Il prof. Edoardo Sabbioni, docente di Meccanica al Politecnico di Milano illustra il progetto Techbus, un innovativo progetto, sviluppato in collaborazione con numerosi partner pubblici e privati, punti a rivoluzionare il trasporto urbano, rendendolo più sicuro, efficiente e sostenibile, attraverso l’utilizzo di veicoli elettrici intelligenti e connessi.
TECHBUS è nato all’interno di un Joint Research Lab sulla mobilità autonoma, connessa ed elettrica, supportato dalla Fondazione Politecnico e mira a rendere il trasporto urbano più efficiente, sostenibile e sicuro. Ha coinvolto numerosi attori pubblici e privati – da ATM a Vodafone, che sono stati un po’ le colonne portanti del progetto, a Solaris, IBM, Brembo, ST Microelectronics, Camera di Commercio Lombardia e Generali Assicurazioni e il supporto del Comune di Milano che ci ha concesso di poter iniziare a fare alcune sperimentazioni.

Il progetto ha ben quattro obbiettivi, innanzitutto aumentare la sicurezza stradale e l’efficienza del servizio di trasporto; poi aumentare il comfort dei passeggeri rendendo l’esperienza di viaggio più accogliente e confortevole per tutti i fruitori del servizio pubblico; quindi rendere la mobilità più sostenibile sia riducendo i consumi che studiando soluzioni innovative per l’elettrificazione dei mezzi.
Per fare questo, nella prima parte del progetto abbiamo strumentato e sensorizzato il veicolo così da aumentare la percezione dell’ambiente circostante il veicolo.
Questo ha consentito di avere a disposizione poi delle informazioni che possono essere comunicate al conducente.
Si è lavorato su un filobus elettrico ATM della linea 90/91, dotandolo di sensori, lidar, radar, telecamere, GPS e sistemi di navigazione avanzati. L’idea è far “vedere” meglio il mezzo: rilevare ostacoli, conoscere l’ambiente circostante e comunicare con l’infrastruttura urbana, ad esempio i semafori.
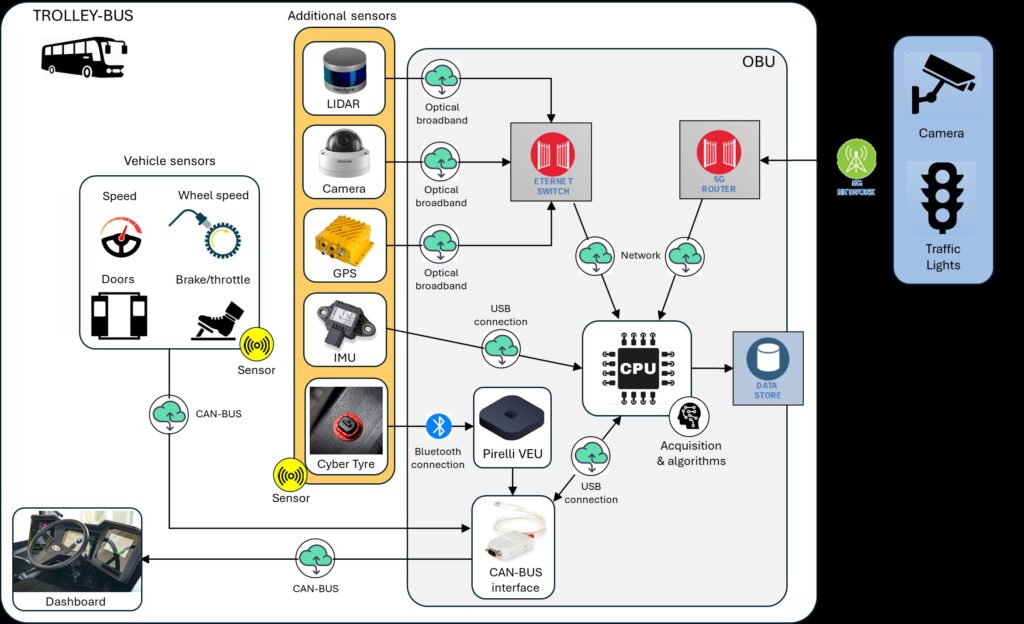
Se la telecamera garantisce la visione, il radar misura distanza, velocità e direzione dei diversi ostacoli, il LIDAR è in pratica un laser che spara dei raggi a 360° e ricostruisce una nuvola di punti che rappresenta tutto l’ambiente circostante al veicolo, un pedone, un ciclista o qualsiasi altro ostacolo che possiamo incontrare sulla strada. Una volta strumentato il veicolo abbiamo impostato una comunicazione tra il veicolo e l’infrastruttura.
Come caso studio abbiamo connesso il veicolo con una serie di una ventina di semafori lungo la tratta della 90 91, così che possono essere ricevute a bordo del veicolo le informazioni relative a questi 23 semafori sulle fasi semaforiche. Quindi semaforo rosso, semaforo verde.
Quanto tempo ho per il passaggio dalla fase di verde alla fase di rosso e viceversa.
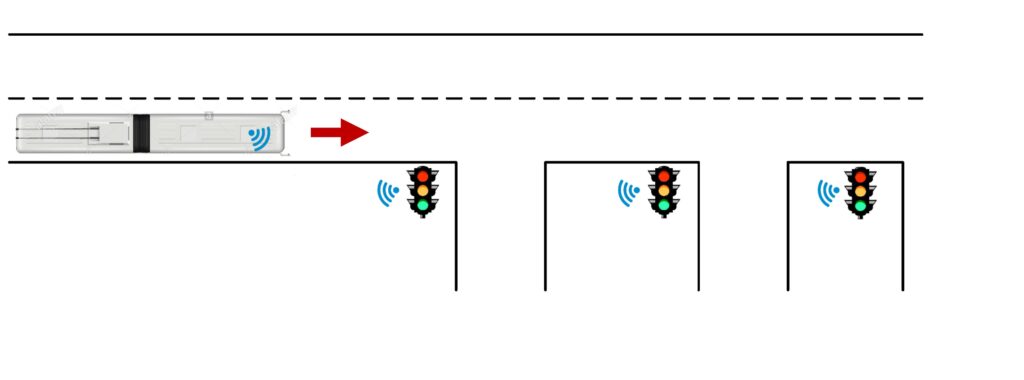
In questo modo, ad esempio, è possibile sapere in anticipo quando un semaforo sta per diventare rosso permette al conducente di rallentare gradualmente, evitando frenate brusche. Questo aumenta la sicurezza, specialmente per i passeggeri in piedi. Inoltre se il semaforo è rosso e so che rimarrà rosso, posso mantenere le porte aperte alla fermata, così da permettere di salire anche ai ritardatari. Infine, ma non meno importante, siccome richiedo una minore accelerazione al veicolo, riduco il consumo.
Nella sperimentazione che abbiamo fatta, al di fuori degli orari di punta e al di fuori degli orari di servizio del veicolo riuscendo a connettere il veicolo con la semaforica, si possono ridurre i consumi di circa il 20%-25%.
Abbiamo completato una prima fase di sperimentazione all’interno della città che è andata sicuramente a buon fine, chiaramente rimangono diversi punti aperti, il primo è quello di testare i sistemi in un contesto di servizio, in mezzo al traffico. Ora il progetto è in pausa, anche perché il Comune di Milano è coinvolto in un nuovo Living Lab finanziato dal PNRR, dove sperimenteremo soluzioni simili in un contesto urbano reale.
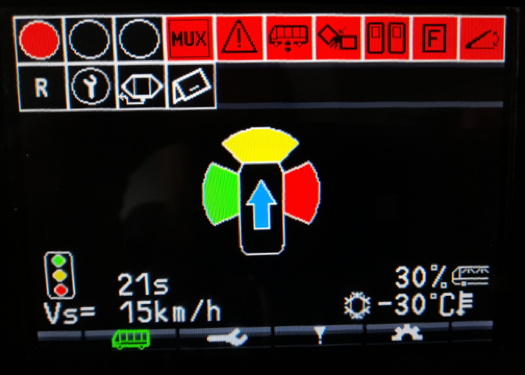
La sfida principale è stata la quantità di informazioni da gestire per il conducente perché contemporaneamente deve guidare, stare attento ai veicoli, agli altri utenti della strada, quindi pedoni, ciclisti, monopattini, in più di stare attento ai passeggeri a bordo che spesso lo distraggono. In particolare per trasmettere informazioni all’autista abbiamo dovuto modificare la dashboard di bordo del veicolo per comunicare dati utili, come la velocità ottimale da tenere o il countdown del semaforo. Serve un addestramento adeguato per abituarsi.

© Lab Immagine Design POLIMI
Nei prossimi anni ci aspettiamo una mobilità sempre più connessa e automatizzata. Non solo per comodità, ma soprattutto per sicurezza: se veicoli, infrastrutture e utenti si scambiano informazioni in tempo reale, si riduce il rischio di incidenti. Penso in particolare ai ciclisti: oggi spesso non sono visibili da camion e autobus. Con i sensori e le telecamere intelligenti, quei “punti ciechi” scompaiono.
Video della sperimentazione di TECHBUS